KOOLS: Kyoto Okayama Optical Low-dispersion Spectrograph
Operation Manual: Auto Guider
KOOLS uses offset-guider for guiding. Auto Guider Unit controls CCD camera for offset-guider, XY-stages of the guider probe and the HCT Lamp used for Comparison spectrum.
The following manual was originally prepared by Dr. Hattori in 2005. Although we made modifications, there may be changes not reflected to this manual. Please let us know any inconsistency.
使い方
[2008/11/17]
準備
- ガイドユニット制御box(カセグレンガイドユニットの黒い箱), agbox(カセグレンガイドユニットにマウントされたbox-PC)のイーサネットケーブルが 接続されていることを確認
- ガイドユニット制御boxの電源投入.
- agboxの電源投入.
- WATEC CCDが動作していることを確認(コントローラのランプが点滅).
- Cont74 GUI上でAuto GuideをONにする.
起動
[2012/07/16]
- リモートログインを行う端末で, 警告音用サーバを立ち上げる. 現状ではAutoGuiderはaniで サーバが立ち上がっていると仮定して設定してある.(agboxへリモートログインするのはani以外でも構わない. 警告音がaniから出るだけ.)
- aniにvisitor1でログイン.ターミナルを開く.
cd kools/sounds/ ruby sound_server.rb
- agboxにリモートログイン:
ssh -l cont74 -Y agbox
-
agboxでターミナルを2枚立ち上げ, それぞれgunitとagを立ち上げる. skycatも起動. &をつけてbackground processにはしない方が良い(Ctrl-Cで殺せるように)。
Auto Guider (ag):
gunit:
- skycatのData-Servers/Image ServersでDSS2を選択してイメージを取得しておく. 20arcmin x 20arcminの広さ (ガイドプローブの移動範囲は約15'×15'). /home/cont74/data/の下に保存. (WCSがしっかりしていて十分な視野があるのであれば、自前で準備したFITS ファイルでも構わない(はず)。)
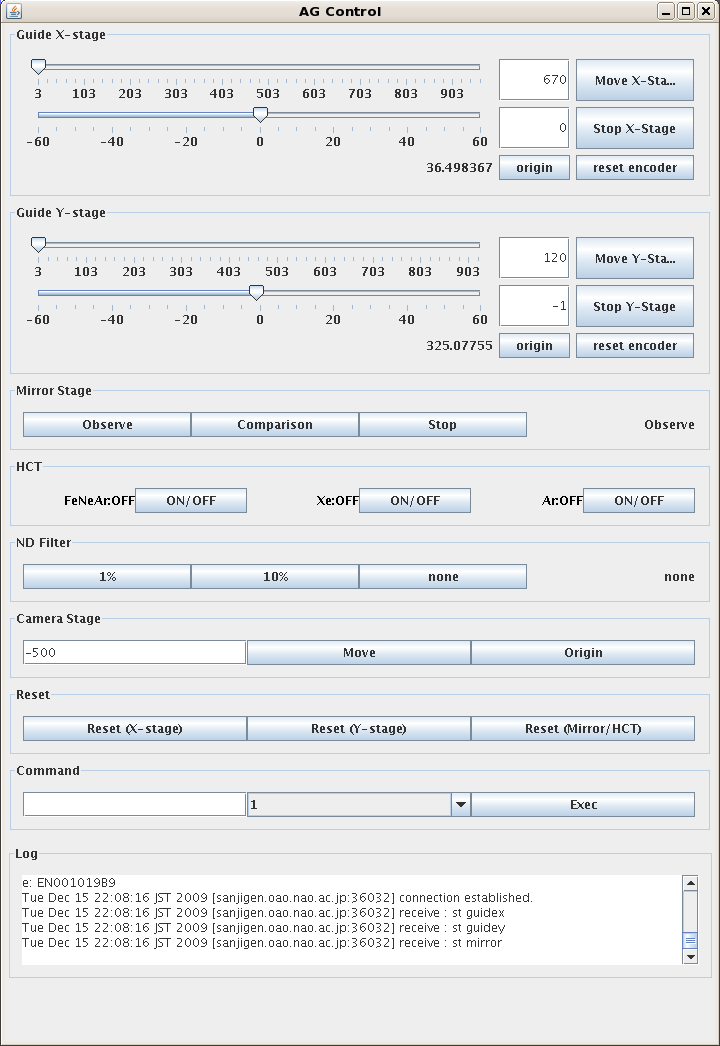
ガイドプロープエンコーダのリセット
- ガイドプロープXYステージのエンコーダは電源が切れると位置情報が失われるので電源投入後リセットする。
- 前回電源を落とす前にオリジンにプローブが来ているはずである。
- Xステージについて、gunitからエンコーダ値30の位置へ持っていく。"Move X-Stage"のボタンの左横のテキストボックスに"30"と入力して"Move X-Stage"のボタンを押す。
- "origin"のボタンを押す。
- エンコーダ値が0に近い値になっていることを確認。もしなっていなかったら、"reset encoder"のボタンを押してから"origin"のボタンを押す
- "reset encoder"を押す。
- Yステージについても同様の手順でリセットを行う。
ガイド星導入
- skycatからgunitへ座標を送る形で行う。
- FITSファイルが表示されたら、メニューのGuiderからDraw guider FOVを選び、
XYステージの配置を表示する。
- まず装置の方で天体の導入を行う. Cont74 GUIで望遠鏡をポインティング. KOOLS側で天体をおおよそスリットの位置にもっていく.
- skycatの装置視野の中での天体の場所を、実際の装置イメージに合わせて
調整する。
skycat上で shift+左クリックすると、マウス位置が装置視野中心になる。- skycat画像はデフォルトでは上が北になっているので、装置の視野に合わせて 回転しておくと良い。
- skycatで拡大縮小、画像反転、画像の変更などを行うと座標系が変わるので、 これらの操作をした場合は必ずDraw guider FOVをやりなおす。
- 適当なガイド星があれば、その星にマウスを合わせてshift+右クリック をする。 星の座標(arcsecond単位)が表示され確認ダイアログが出てくるので、 値に問題がなければOKを押してガイドプローブを動かす。
- 座標系はこれ(上が北、左が東)。 変な値が出てきた場合は座標系がずれている可能性が高いので、キャンセルして Draw guider FOVをやりなおす。
- agの画面で星が入ってくるのを確認し、ガイドを開始する。
- 導入例
 と
と の両方をONにする。
の両方をONにする。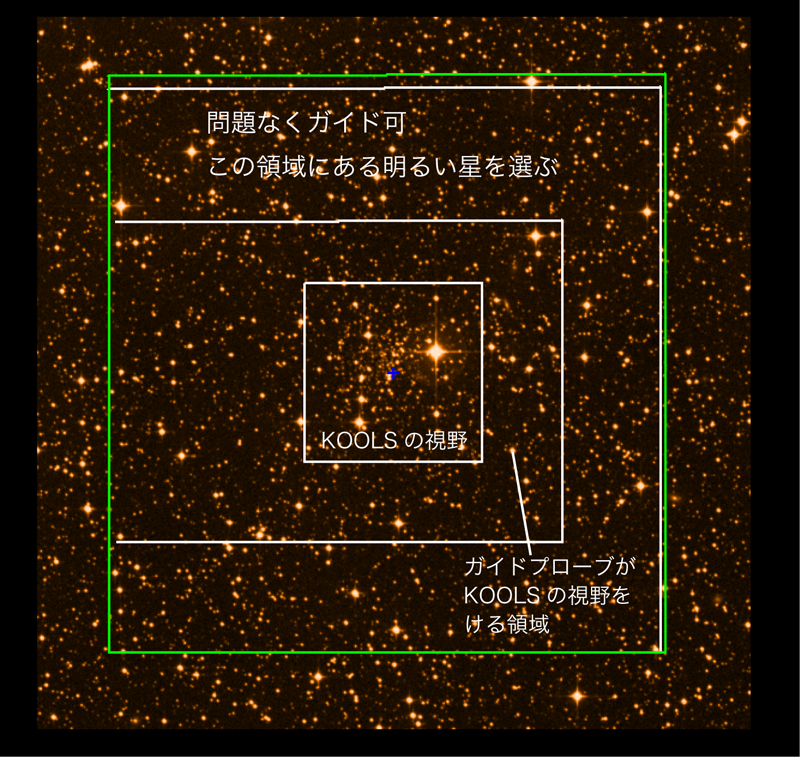{kind=link}
{kind=link}
終了
gunitウィンドウの右上×ボタンを押す。agは「File」→「Exit」で終了。PAの設定
現在はinstrument rotatorがPA=90°の状態をデフォルトの設定としている。PAを変更するときは、skycatの 「Guider」→「Set Position Angle..」で 表示されるdialogに入力する。()内に表示されているのは現在値。
ガイドユニット GUI
- 手動でガイドプローブを動かしたい時、ガイドをしながら天体位置の微調整を したい時などに使用する。
- 数値の単位はarcsecondで、右下に現在値が表示されている。
- 上側のスライダーが絶対座標、下側が相対座標での移動に使用する。
- 各スライダーの右にある欄の数字はスライダーに合わせて変化するが、 ここに直接数値を入力しても良い。"以下の精度で動かす場合には数値を入力する 必要がある。
- 「Move X/Y-Stage」を押すと、相対座標が0以外の値であればその分だけ移動し、 絶対座標は無視される。相対座標が0であれば絶対座標の値を見て、その位置まで 移動する。
- 移動先が可動範囲を越えていればerrorとなる(はず)。
- XステージとYステージは同時に動かすことができ、途中でキャンセルしたい場合は 「Stop X/Y-Stage」(減速停止)を押す。
ミラー
calibration用の光源を装置に入れるための鏡。
「Observe」は鏡を抜いて望遠鏡からの光を装置に入れる、「Comparison」は 鏡が入り積分球からの光を装置に入れる状態を表す。
NDフィルター
積分球の出口に、1%と10%のNDフィルターを入れることができる。 ※汚れているのでもっと透過率が低い可能性あり
「none」は素通しの状態。
HCT
ランプのON/OFF。KOOLSではFeNeArを使用する。
Camera Stage
WATEC CCD カメラの焦点位置を調整する.
動かしたいパルス数を入力(1000, -500など)して"Move"を押す.
Originが0で、最大16666まで.
KOOLSの場合、Originに近い場所でほぼ良いようである.
[2008/11/17]
非恒星天体の追尾
[2009/12/07]
太陽系天体などの非恒星天体の追尾は、AutoGuiderに対象天体の時刻毎のRA, Decを予め入力しておき、KOOLS視野に分光天体を導入した上で、ガイドに使用する恒星をSkyCat / ag 上で選択しガイドを行う。agが非恒星天体の移動量に応じてガイド中心を動かすことで追尾を行う。
- "Guide"メニュー → "Read Non-Sidereal Data.."を選択して位置情報のファイルを読み込む。正常に読み込めれば、非恒星天体追尾モードに入る。
- 追尾をやめたい場合は "Guide"メニュー → "Stop Non-Sidereal Motion"を選択する。
- agの視野からガイドボックスがはみでると追尾ができなくなる。この時はガイド星を選び直す。
agに読み込む対象天体の位置情報のフォーマット
yyyy mm dd hh mm ss RA(deg) Dec(deg)
例
2009 03 31 15 10 00 262.761667 37.0432778
- 時刻はUT
- 空白は半角スペース
- 時刻は秒まで整数で読み込む
- RA, DecはDoubleで読み込む
非恒星天体追尾時のag上のガイドボックスの移動方向
PA=90degの時
- 対象天体の移動方向が+RAの時、ag画面上で恒星は右方向(= -RA方向)に、+DECの時、ag画面上で恒星は下方向(= -DEC方向)に動く。ガイドボックスがag視野の端にかかるとそれ以上追尾できなくなるので、追尾開始時はこのようなガイドボックスの動きを考慮して恒星の位置を調整しておくのがよい。
Notes
ts800
- gunit立ち上げ前にはserial IO serverのts800(133.40.61.102)を立ち上げておく 必要がある。
- 制御ボックス天井面に取り付けてあるので、gunit立ち上げの際に
I/O connection to ts800 was failed.
と出るようであれば、ts800の電源が入っているか、ネットワークケーブルは 繋がっているか等を確認する。 - 再接続を試みるような仕様になっていないので、一旦接続が切れてしまうと プログラムを再起動する必要がある。
- gunitが×ボタンで終了しない場合は、立ち上げたターミナルでCtrl-C。
XYステージ座標
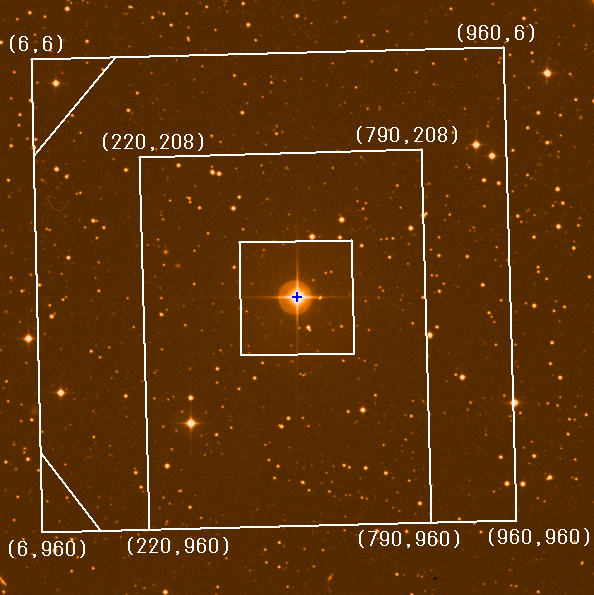
- 機器改修に伴ってXYステージの座標系がずれることがある。 KOOLSとのアライメントは、明るい星をKOOLSで中心に導入した後、 プローブを動かして同じ星を入れ、Skycat上での位置とのずれを測って再設定する。 (agbox:/home/cont74/.skycat/guider_plugin.tcl)
- 座標系の対応:
ソフトウェアトラブル
通信の問題などでソフトウェアがおかしくなることは十分考えられるので、 ステータスが読めていなかったり挙動がおかしくなったりしたら、躊躇せず 再起動する。旧制御系と違ってXYステージのリセットは必要なくなったので、タイムロスは ほとんどないはず。
ガイドCCDコントローラー
CCDのコントローラーは積分球脇に取り付けられているので、シャッター速度や ゲインの調整などが必要なときはそちらで。-
[2009/11/07更新]
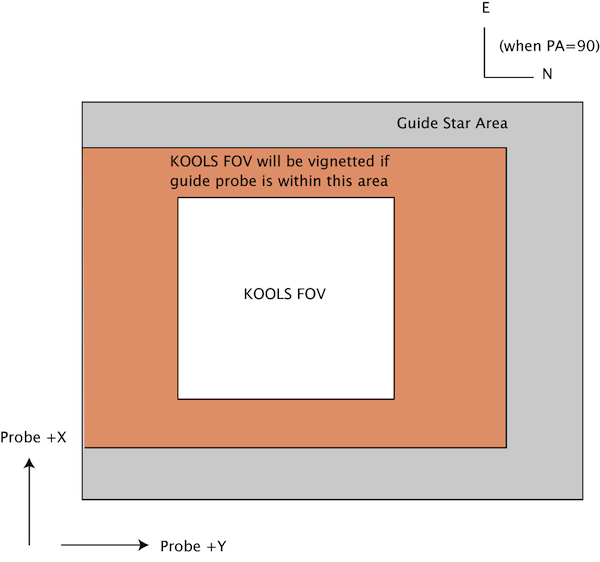
AGの視野方向: PA=90度の場合N | E- - |
-
AGプローブを動かしたときの天体の位置の変化:
probe+x: AG上で+x方向に星が動く
probe+y: AG上で-y方向に星が動く(gunitの動かす数値とAG画面上で星の動く方向) -- +x | | +y
- AG上でのpixel scaleは0.16"/pix [20060927]